業(yè)務(wù)咨詢熱線:
電話:13873397666
座機(jī):0769-81818179
郵箱:kulkee-power@dgjiuqi.com

業(yè)務(wù)咨詢熱線:
電話:13873397666
座機(jī):0769-81818179
郵箱:kulkee-power@dgjiuqi.com

東莞市玖琪實(shí)業(yè)有限公司
聯(lián)系人:梁先生
手機(jī):13873397666
電話:0769-81818179
傳真:0769-81806179
地址:東莞市石排鎮(zhèn)谷嚇村孔屋工業(yè)區(qū)
郵編:523339
官方網(wǎng)站:http://coiledpins.cn/
步進(jìn)電機(jī)基礎(chǔ)知識(shí)講解 | |||||||||||||||||||||||||||||
1.步進(jìn)電機(jī)的簡(jiǎn)介
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。您可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)您可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。 2.步進(jìn)電機(jī)的發(fā)展史
3.步進(jìn)電機(jī)的特點(diǎn)
相對(duì)伺服電機(jī)來(lái)說(shuō),伺服電機(jī)內(nèi)部通過(guò)安裝旋轉(zhuǎn)編碼器實(shí)現(xiàn)了反饋控制,伺服電機(jī)可以達(dá)到的轉(zhuǎn)矩要高于步進(jìn)電機(jī),但是價(jià)格相對(duì)也高,所以在轉(zhuǎn)矩能滿足的情況下,推薦用步進(jìn)電機(jī)。步進(jìn)電機(jī)配合驅(qū)動(dòng)器使用,很多驅(qū)動(dòng)器都支持細(xì)分功能,即實(shí)現(xiàn)很小的步進(jìn)角,控制更精確。 4.步進(jìn)電機(jī)的主要分類復(fù)讀機(jī)電源適配器 步進(jìn)電機(jī)在構(gòu)造上有三種主要類型:反應(yīng)式(VariableReluctance,VR)、永磁式(PermanentMagnet,PM)和混合式(HybridStepping,HS)。
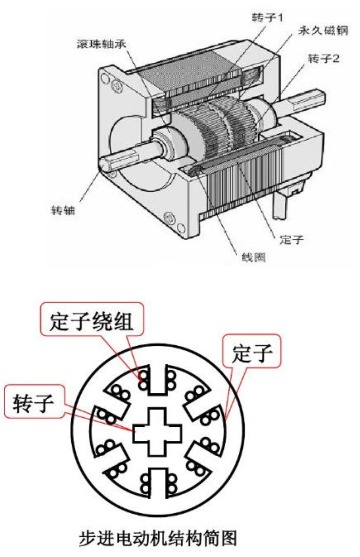
按定子上繞組來(lái)分,共有二相、三相和五相等系列。最受歡迎的是兩相混合式步進(jìn)電機(jī),約占97%以上的市場(chǎng)份額,其原因是性價(jià)比高,配上細(xì)分驅(qū)動(dòng)器后效果良好。該種電機(jī)的基本步距角為1.8°/步,配上半步驅(qū)動(dòng)器后,步距角減少為0.9°,配上細(xì)分驅(qū)動(dòng)器后其步距角可細(xì)分達(dá)256倍(0.007°/微步)。由于摩擦力和制造精度等原因,實(shí)際控制精度略低。同一步進(jìn)電機(jī)可配不同細(xì)分的驅(qū)動(dòng)器以改變精度和效果。 5.步進(jìn)電機(jī)的主要結(jié)構(gòu)
在定子磁極和轉(zhuǎn)子上都開(kāi)有齒分度相同的小齒,采用適當(dāng)?shù)凝X數(shù)配合,當(dāng)A相磁極的小齒與轉(zhuǎn)子小齒一一對(duì)應(yīng)時(shí),B相磁極的小齒與轉(zhuǎn)子小齒相互錯(cuò)開(kāi)1/3齒距,C相則錯(cuò)開(kāi)2/3齒距。
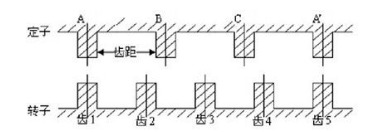
A相繞組與齒1、5一一對(duì)應(yīng),而此時(shí)B相繞組與齒2錯(cuò)開(kāi)1/3齒距,而與齒3錯(cuò)開(kāi)2/3齒距,C相繞組與齒3錯(cuò)開(kāi)2/3齒距,而與齒4錯(cuò)開(kāi)1/3齒距。 電機(jī)的位置和速度由繞組通電次數(shù)(脈沖數(shù))和頻率成一一對(duì)應(yīng)關(guān)系。而方向由繞組通電的順序決定。6.步進(jìn)電機(jī)的選型 電機(jī)的步距角取決于負(fù)載精度的要求,將負(fù)載的最小分辨率(當(dāng)量)換算到電機(jī)軸上,每個(gè)當(dāng)量電機(jī)應(yīng)走多少角度(包括減速)。電機(jī)的步距角應(yīng)等于或小于此角度。 步進(jìn)電機(jī)的動(dòng)態(tài)力矩一下子很難確定,我們往往先確定電機(jī)的靜力矩。靜力矩選擇的依據(jù)是電機(jī)工作的負(fù)載,而負(fù)載可分為慣性負(fù)載和摩擦負(fù)載二種。一般情況下,靜力矩應(yīng)為摩擦負(fù)載的2-3倍內(nèi)好,靜力矩一旦選定,電機(jī)的機(jī)座及長(zhǎng)度便能確定下來(lái)(幾何尺寸) 進(jìn)電機(jī)一般在較大范圍內(nèi)調(diào)速使用、其功率是變化的,一般只用力矩來(lái)衡量,力矩與功率換算如下: P=Ω·MΩ=2π·n/60P=2πnM/60 7.步進(jìn)電機(jī)與伺服電機(jī)的區(qū)別 步進(jìn)電機(jī)  伺服電機(jī)  ·控制精度不同 步進(jìn)電機(jī)的動(dòng)態(tài)力矩一下子很難確定,我們往往先確定電機(jī)的靜力矩。靜力矩選擇的依據(jù)是電機(jī)工作的負(fù)載,而負(fù)載可分為慣性負(fù)載和摩擦負(fù)載二種。一般情況下,靜力矩應(yīng)為摩擦負(fù)載的2-3倍內(nèi)好,靜力矩一旦選定,電機(jī)的機(jī)座及長(zhǎng)度便能確定下來(lái)(幾何尺寸) ·低頻特性不同 步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速升高而下降,且在較高轉(zhuǎn)速時(shí)會(huì)急劇下降,所以其最高工作轉(zhuǎn)速一般在300~600RPM。交流伺服電機(jī)為恒力矩輸出,即在其額定轉(zhuǎn)速(一般為2000RPM或3000RPM)以內(nèi),都能輸出額定轉(zhuǎn)矩,在額定轉(zhuǎn)速以上為恒功率輸出。 ·矩頻特性不同 步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速升高而下降,且在較高轉(zhuǎn)速時(shí)會(huì)急劇下降,所以其最高工作轉(zhuǎn)速一般在300~600RPM。交流伺服電機(jī)為恒力矩輸出,即在其額定轉(zhuǎn)速(一般為2000RPM或3000RPM)以內(nèi),都能輸出額定轉(zhuǎn)矩,在額定轉(zhuǎn)速以上為恒功率輸出。 ·過(guò)載能力不同 步進(jìn)電機(jī)一般不具有過(guò)載能力。交流伺服電機(jī)具有較強(qiáng)的過(guò)載能力。 ·運(yùn)行性能不同 步進(jìn)電機(jī)的控制為開(kāi)環(huán)控制,啟動(dòng)頻率過(guò)高或負(fù)載過(guò)大易出現(xiàn)丟步或堵轉(zhuǎn)的現(xiàn)象。交流伺服驅(qū)動(dòng)系統(tǒng)為閉環(huán)控制,驅(qū)動(dòng)器可直接對(duì)電機(jī)編碼器反饋信號(hào)進(jìn)行采樣一般不會(huì)出現(xiàn)步進(jìn)電機(jī)的丟步或過(guò)沖的現(xiàn)象,控制性能更為可靠。 ·速度響應(yīng)性能不同 步進(jìn)電機(jī)從靜止加速到工作轉(zhuǎn)速(一般為每分鐘幾百轉(zhuǎn))需要200~400毫秒。交流伺服系統(tǒng)的加速性能更好,可用于要求快速啟停的控制場(chǎng)合。
文章轉(zhuǎn)載自網(wǎng)絡(luò),如有侵權(quán),請(qǐng)聯(lián)系刪除。 | |||||||||||||||||||||||||||||
| | 發(fā)布時(shí)間:2018.11.23 來(lái)源:電源適配器廠家 |
| 上一個(gè):質(zhì)量是一種習(xí)慣,質(zhì)量就是符合要求 | 下一個(gè):電源適配器的穩(wěn)定性和控制環(huán)路補(bǔ)償 |
東莞市玖琪實(shí)業(yè)有限公司專業(yè)生產(chǎn):電源適配器、充電器、LED驅(qū)動(dòng)電源、車載充電器、開(kāi)關(guān)電源等....
版權(quán)所有:東莞市玖琪實(shí)業(yè)有限公司
聯(lián)系人:梁先生 電話:13873397666
電話:0769-81818179 傳真:0769-81806179 地址:東莞市石排鎮(zhèn)谷嚇村孔屋工業(yè)區(qū) 郵編:523339